













駛向『閉環』| LMDrive:首篇基于LLM的閉環端到端自動駕駛
本文經自動駕駛之心公眾號授權轉載,轉載請聯系出處。
寫在前面&筆者的個人理解
汽車人這兩天在arxiv上看到了港中文MMLab&商湯的一篇關于閉環自動駕駛的工作,結合了大語言模型。不幸湯老師于12月15日與世長辭,R.I.P.
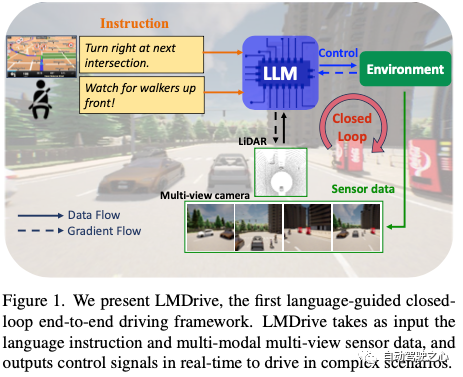
盡管自動駕駛領域最近取得了重大進展,但當遇到長尾不可預見事件和具有挑戰性的城市場景時,現代方法仍然很困難,可能會發生嚴重事故。一方面,大型語言模型(LLM)已經顯示出接近“通用人工智能”的表達推理能力。另一方面,先前的自動駕駛方法往往依賴于有限的格式輸入(例如傳感器數據和導航路線點),限制了車輛理解語言信息和與人類互動的能力。為此,港中文 & MMLab重磅推出LMDrive,這是一種全新的語言引導、端到端閉環自動駕駛框架。LM-Drive獨特地處理并集成了多模態傳感器數據與自然語言指令,使其能夠在現實的教學環境中與人類和導航軟件進行交互。為了促進對基于語言的閉環自動駕駛的進一步研究,我們還公開發布了相應的數據集,其中包括大約64K的指令跟隨數據clip,以及測試系統處理復雜指令和具有挑戰性的駕駛場景的能力的LangAuto基準。進行了大量的閉環實驗來證明LMDrive的有效性。據我們所知,本文是第一個利用LLM實現閉環端到端自動駕駛的工作。
開源鏈接:https://github.com/opendilab/LMDrive
總結來說,LMDrive的主要貢獻如下:
- 提出了一種新的端到端、閉環、基于語言的自動駕駛框架LMDrive,該框架通過多模態多視圖傳感器數據和自然語言指令與動態環境交互;
- 提供了一個包含約64K個數據clip的數據集,其中每個片段包括一個導航指令、幾個通知指令、一系列多模態多視圖傳感器數據和控制信號。clip的持續時間從2秒到20秒不等。
- 提出了全新的基準—LangAuto,用于評估將語言指令作為導航輸入的自主代理,其中包括誤導性/長指令和具有挑戰性的對抗性駕駛場景。
- 本文進行了廣泛的閉環實驗,以證明所提出的框架的有效性,并分析了LMDrive的不同組件,以闡明沿著這一方向的持續研究。
相關工作回顧
端到端自動駕駛
最近,端到端自動駕駛領域取得了很大進展。UniAD設計了一個包含全棧驅動任務的框架,并利用查詢統一接口在不同任務之間進行通信。ThinkTwice設計了一個Look模塊來檢索關鍵區域的信息,并利用這些特征來細化粗略預測。ReasonNet利用駕駛場景的時間和全局信息來提高感知性能并有利于遮擋檢測。InterFuser提出了一種基于transformer的框架,以完全融合和處理來自多模態多視圖傳感器的信息,從而實現全面的場景理解。TCP提出了一種新的多步預測方法,將軌跡規劃和直接控制這兩個分支集成在一起。LAV引入了一些監督任務來學習視點不變表示,該表示可以在訓練時提供更豐富的監督信號,并在推理過程中為復雜推理提供更多信息。除了之前討論的模仿訓練方法之外,還有幾種方法試圖結合強化學習策略。以監督的方式訓練潛在DRL,以獲得環境觀測的潛在表示,并使用該表示作為輸入進行強化學習。Roach使用了一個具有特權訪問環境信息的強化學習代理,并提取一個模型作為最終代理。ASAPRL和TaEcRL利用抽象技能,通過促進有效的探索和獎勵信號,有效提高強化學習效率和最終表現。然而,這些端到端的方法缺乏與人類(乘客)進行口頭或文本交互的能力,并且在決策過程中通常具有較低的可解釋性。
駕駛任務中的大語言模型
在過去的幾個月里,大型語言模型(LLM)取得了新的進展。此外,視覺大語言模型(VLLM)進一步引入了視覺編碼器,并為LLM不僅解釋文本數據,還解釋其他模態的圖像和數據打開了大門。在自動駕駛領域,最近的研究將LLM集成到自動駕駛系統中,以更好地解釋和與人類的自然互動。一些研究采用了視覺語言模型方法,該方法可以處理多模態輸入數據,并為駕駛場景提供文本描述和控制信號。例如,DRIVEGPT4提出了一種多模態LLM框架,該框架將一系列幀作為輸入,然后生成對人類詢問的響應,并預測下一步的控制信號。然而,由于該框架缺乏輸入命令,預測的控制無法遵循特定的導航命令,這表明該框架很難在真實場景中部署。與此同時,更多的研究人員專注于將駕駛情況轉換為文本描述,作為LLM的輸入,以直接解釋和推理綜合駕駛情況。在這一系列工作中,GPT-Driver通過將異構場景輸入轉換為語言標記,將運動規劃重新表述為自然語言建模的任務。LanguageMPC利用LLM來推理復雜場景并輸出高級駕駛決策。然后,該方法調諧參數矩陣以將決策轉換為低電平控制信號。LLM-Driver利用數字矢量作為輸入模態,并融合矢量化對象級2D場景表示,使LLM能夠基于當前環境回答問題。
然而,這項工作只考慮了開環設置中的駕駛問題,而忽略了累積誤差、時間動作一致性和端到端可訓練性等問題,這些問題對于將模型帶入實際的閉環駕駛任務至關重要。據我們所知,我們是第一個在閉環環境中基于語言的端到端自動駕駛方法。相關數據集、基準和訓練模型也是開源的,以促進社區的進一步研究。
數據生成
數據集制作的目標是開發一種智能駕駛代理,該代理可以基于三種輸入源生成駕駛動作:1)傳感器數據(環視相機和激光雷達),使該代理能夠生成感知并符合當前場景的動作;2) 導航指令(例如變道、轉彎),使代理可以駕駛以滿足自然語言的要求(來自人類或導航軟件的指令);以及3)人類注意指令,使代理能夠與人類互動并適應人類的建議和偏好(例如,關注對抗性事件、處理長尾事件等)。本節描述了如何生成訓練代理所需的多模態數據集,以及導航指令和人工通知指令的提示設計。具體來說,我們選擇CARLA作為仿真器,因為它可以模擬真實的動態閉環世界,并且在端到端自動駕駛領域被廣泛采用。數據采集包括兩個階段:1)利用專家代理收集傳感器數據和控制信號;以及2)用指令解析和標記所收集的數據。
傳感器和控制數據收集。我們利用基于規則的專家代理來創建一個包括大約3M個驅動幀的數據集。由于專家代理可以訪問CARLA中的特權信息,因此該數據集將包括相機數據、激光雷達數據和每幀的控制動作。為了增強所收集數據集的多樣性,該代理在2.5k條路線、8個城鎮和21種環境條件(如天氣、一天中的時間)上運行。我們使用四個RGB相機(左、前、右、后)和一個激光雷達。側面攝像頭的角度為60°。此外,我們對前面的圖像進行中心裁剪,作為額外的聚焦視圖圖像,以捕捉遠處紅綠燈的狀態。激光雷達有64個通道,每秒產生600K個點。
解析和語言注釋。在第二階段,我們將收集的數據解析為clip,并用適當的導航指令和可選的通知指令標記每個片段。解析過程將一系列幀作為輸入,并將這些幀分段為clip,其中每個clip對應一個導航指令。例如,如果代理在第T0幀開始左轉并在第Tn幀結束,我們將把(T0,Tn)標記為新剪輯,并指示“在下一個十字路口左轉”。此外,如果在時間Ta發生對抗性事件1,我們將在該片段中添加一條通知指令,模擬真實場景,當緊急情況發生時,乘客或側面輔助系統將與駕駛員進行通信。如圖2所示,每個片段包括傳感器數據、控制信號、相應的導航指令和可選的通知指令。解析后的剪輯在剪輯長度和相應指令方面的分布如圖3所示。在我們的數據集中,我們收集了64K個解析片段和464K條通知指令。

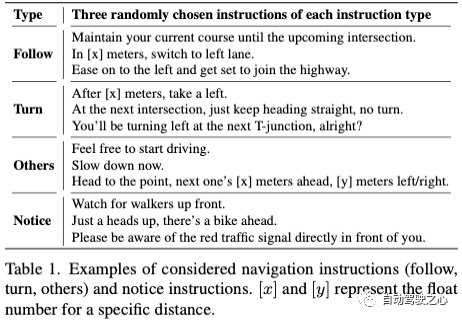
指令設計。我們考慮三種類型的導航指令(跟隨、轉向和其他)以及一種類型的通知指令,共由56種不同的指令組成。表1顯示了一些示例,完整列表可在補充材料中找到。為了使代理能夠在現實的教學環境中駕駛,其中指令來自導航軟件或人類:
- 使指令多樣化:考慮到自然語言的內在豐富性,對于每種類型的指令,使用ChatGPT API生成了八種不同的變體,每個變體具有相同的語義,但措辭不同。這使得語言解釋更加全面和靈活,能夠適應相同指令的不同傳達方式。
- 包含誤導性說明:在現實世界中,導航軟件或乘客可能會向AV發出違反交通規則或引發安全問題的誤導性說明。例如,在單行道上,遵循“變左車道”的指示是危險的。為了提高我們的模型對誤導性指令的穩健性,我們模擬了這些場景,并將它們添加到我們的數據集中。
- 連接多個指令:在許多情況下,指令可能由兩到三個連續的指令組成,例如“在這個十字路口右轉,然后直行到下一個十字路口再右轉。”我們還構建了一些連續的復雜指令數據,以模擬真實的基于導航的駕駛場景。
LMDrive解析
在這項工作中,我們提出了LMDrive,這是一個可以通過自然語言理解和遵循高級駕駛指令的框架。如圖4所示,LM-Drive由兩個主要組件組成:1)視覺編碼器,處理多視圖多模態傳感器數據(相機和激光雷達),用于場景理解和生成視覺標記;2) 一個大型語言模型及其相關組件(標記器、Q-Former和適配器),該組件接收視覺標記和語言指令,以預測控制信號以及給定指令是否完成。

視覺編碼器
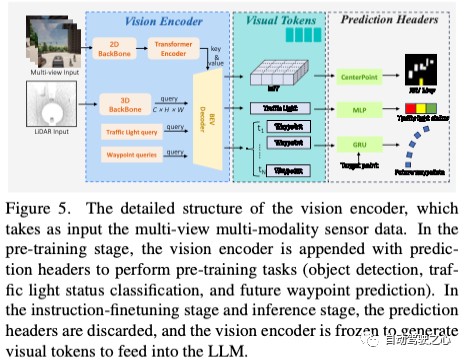
在視覺語言社區中,對齊視覺和語言的最常見方法可以是使用預先訓練的CLIP模型來編碼圖像特征。然而,CLIP模型的大觸發器和參數大小增加了其在AV系統中的部署難度。此外,AV感知系統通常是3D的,以包括激光雷達輸入。因此,受InterFuser和TF++的啟發,我們設計了一種多視圖多模態視覺編碼器來編碼/融合傳感器數據。如圖5所示,視覺編碼器由傳感器編碼部分和BEV解碼器組成,傳感器編碼部分分別對圖像和激光雷達輸入進行編碼,BEV解碼器融合圖像和點云特征以生成視覺標記,然后將其傳遞到語言模型。值得注意的是,通過添加額外的預測頭,對視覺編碼器進行感知任務的預訓練,然后凍結編碼器以供大型語言模型稍后使用。
傳感器編碼。對于每個圖像輸入,使用2D主干ResNet來提取圖像特征圖。然后將特征圖展平為一維token。為了從多個角度全面理解全局上下文,來自不同視圖的令牌將通過標準K層transformer編碼器進行融合,每一層都包含多頭自注意力、MLP塊和layer normalization。對于激光雷達輸入,采用3D骨干PointPillars將原始點云數據處理為以自車為中心的激光雷達特征,其中每個pillar包含0.25m×0.25m區域內的點。然后使用PointNet來聚合特征,并將特征圖下采樣到C×H×W,隨后用作BEV查詢。
BEV解碼器。然后將上面編碼的傳感器特征傳遞到BEV解碼器中以生成視覺標記。具體而言,BEV解碼器被設計為具有K層的標準transformer。BEV點云特征作為H×W查詢被饋送到BEV解碼器,以關注多視圖圖像特征并生成BEV令牌。我們還將N個可學習查詢和1個可學習詢問饋送到BEV解碼器,以分別生成N個路點token和1個紅綠燈token。因此,三種類型的視覺標記(BEV、航路點和紅綠燈)將包含豐富的場景信息,然后將饋送給大型語言模型。
使用預測頭進行預訓練。我們考慮了三個視覺編碼器預訓練任務:目標檢測、未來航路點預測和紅綠燈狀態分類。對于目標檢測,BEVtoken將通過一個階段的中心點來預測Hm×Wm區域中目標的邊界框和速度。對于航路點預測,我們將N個航路點標記和導航航路點依次傳遞到GRU網絡中,以預測N個未來航路點。對于紅綠燈狀態分類,將2層MLP應用于紅綠燈令牌。考慮了三個相應的損耗項:1)InterFuser中的檢測損耗;2) l1路失分;以及3)交叉熵交通信號燈狀態損失。請注意,這些預測頭僅用于視覺編碼器的預訓練,并且將在LLM的訓練和整個模型的推理中被丟棄。
LLM for instruction-following auto driving
如圖4所示,在我們的框架中,LLM在整個駕駛過程中充當“大腦”,處理凍結視覺編碼器為每一幀生成的傳感器token,理解自然語言指令,生成必要的控制信號,并預測給定指令是否完成。具體而言,我們選擇LLaMA作為語言主干,它已被廣泛用于許多語言和視覺教學調整模型。我們還有三個相關的組件來橋接LLM與指令、視覺信息輸入和動作預測:1)標記器,2)Q-Former,3)兩個適配器。
指令和可視化tokenization。給定導航指令和可選通知指令,使用LLaMA標記器將指令轉換為文本標記。請注意,執行一條指令的持續時間將從幾秒鐘到幾分鐘不等,并且我們的模型是在閉環設置中部署的。因此,在每一幀,我們利用所有歷史傳感器信息(具有最大極限Tmax)來降低累積誤差并提高模型的時間一致性。具體而言,對于每幀的多視圖多模態傳感器輸入,我們利用上一節中預先訓練的視覺編碼器來生成視覺標記(H×W BEV標記、N個航路點標記和一個紅綠燈標記)。然而,視覺標記的數量(例如,每幀406個標記)對于LLM來說迅速增長得太大,因為通常需要數百個幀來完成一條指令。為了克服這一點,本文遵循BLIP-2 使用Q-Former來減少視覺標記的數量。具體來說,對于每一幀,我們使用M個可學習查詢來通過交叉注意力層處理視覺令牌,這可以將每一幀的視覺令牌數量減少到M。隨后,我們使用2層MLP適配器將Q-Former提取的令牌轉換為與語言令牌共享相同的維度,然后將其饋送到LLM中。
行為預測。在接收到一系列指令和視覺標記后,LLM預測動作標記。然后應用另一個2層MLP適配器來預測未來的路點,以及指示給定指令是否已完成的標志。注意,為了增強監督信號,我們還將在訓練期間對每個歷史幀進行預測,并且在推理時只執行最新幀的預測。為了獲得最終的控制信號,包括制動、節流和轉向,遵循LBC,使用兩個PID控制器進行橫向和縱向控制,分別跟蹤預測航路點的航向和速度。
訓練目標。當微調LLM及其相關組件時,我們考慮兩個損失項:1)l1航路點損失;2) 分類損失(交叉熵),用于確定當前幀是否完成給定的指令。
LangAuto基準
我們提出了LangAuto(語言引導的自動駕駛)CARLA基準,這是第一個評估語言指令下閉環駕駛性能的基準。與之前的CARLA基準測試Town05和Longest6相比,我們的基準測試僅為AV提供自然語言的導航指令和可選通知指令。
具體而言,LangAuto基準涵蓋了CARLA的所有8個公共城鎮,包括各種場景(如高速公路、十字路口、環形交叉口)。我們還考慮了16種環境條件,包括7種天氣條件(晴朗、多云、潮濕、中雨、多云、大雨、軟雨)和3種日光條件(夜間、中午、日落)的組合。此外,LangAuto由三個軌道組成,以全面測試agent的指令跟隨能力:
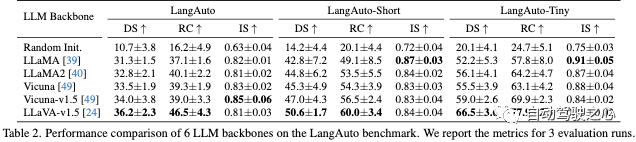
- LangAuto跟蹤:對于每條路線,都會根據代理的當前位置向代理提供并更新導航指令。我們還將這條賽道分為三個不同路線長度的經典賽道,以更好地區分性能。路線長度超過500米的LangAuto,路線長度在150米到500米之間的LangAuto Short,以及路線長度短于150米的LangAuto Tiny。
- LangAuto-Notice跟蹤:在LangAuto跟蹤的基礎上,我們向代理添加了額外的通知說明。該設置模擬了乘客或其他輔助系統可以在長距離復雜或對抗性場景中發出實時通知的真實情況,這通常是AV系統難以自行處理的。理想情況下,能夠理解和利用指令的代理可以實現更好的性能。
- LangAuto-Sequential跟蹤:基于LangAuto跟蹤,我們將10%的連續2到3條指令合并為一條長指令。此設置模擬了來自乘客或導航軟件的多語句指令的現實場景。
請注意,誤導性指示將隨機(~5%)間歇性地提供給駕駛代理,并持續一定的時間(1-2秒)。駕駛代理應拒絕這些誤導性指令,并執行符合當前場景的安全操作,直到產生下一個正確指令。
實驗結果
定量結果
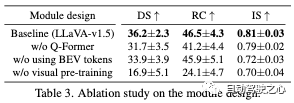
消融實驗
LangAuto-Notice Benchmark

LangAuto-Sequential Benchmark

可視化結果

結論
本文介紹了LMDrive,這是一個語言引導的端到端閉環自動駕駛框架。LMDrive結合了自然語言指令和多模式傳感器數據,實現了復雜駕駛場景中的人機交互和導航。我們還提出了語言引導駕駛數據集,包括大約64K個多模態數據片段以及相應的導航指令。此外還建立了LangAuto基準,用于評估考慮自然語言指令的自動駕駛系統。通過廣泛的閉環實驗證明了LMDrive的有效性,強調了改善自動駕駛汽車與人類和環境相互作用的潛力。我們的工作是在基于語言的閉環端到端自動駕駛領域進一步探索和發展的一個鼓勵起點。

原文鏈接:https://mp.weixin.qq.com/s/2TSWGZTiBYkwF8xteKcu8w




























