













鰻魚劈斷后下半身還能運(yùn)動(dòng),機(jī)器人:拿來吧你
本文經(jīng)AI新媒體量子位(公眾號ID:QbitAI)授權(quán)轉(zhuǎn)載,轉(zhuǎn)載請聯(lián)系出處。
機(jī)器人的部件通信中斷后,還能正常做動(dòng)作嗎?
這里的部件,指傳感器、通信總線、控制電路,是機(jī)器人運(yùn)動(dòng)的核心。
現(xiàn)在,一群來自EPFL的科學(xué)家在觀察鰻魚后,得出結(jié)論:可以!
他們模擬鰻魚的結(jié)構(gòu),造了個(gè)“通信中斷也能繼續(xù)運(yùn)動(dòng)”的機(jī)器人,極大地提升了機(jī)器人的運(yùn)動(dòng)能力。

研究已經(jīng)登上Science Robotics封面:

一起來看看。
控制&傳感器中斷,也能做動(dòng)作
通常來說,如果動(dòng)物的脊髓 (中樞神經(jīng)系統(tǒng))被截?cái)啵蜁?huì)出現(xiàn)對應(yīng)的肢體癱瘓。
即使是脊椎動(dòng)物(如大部分魚類),切斷脊髓后也無法協(xié)調(diào)動(dòng)作,運(yùn)動(dòng)能力嚴(yán)重下降。
但魚類中的鰻魚,在被砍斷一半后,下半身還能做出游泳的動(dòng)作。

△從砧板上溜走的一截鰻魚
這引起了科學(xué)家們的興趣:能否給機(jī)器人也整一個(gè)?
機(jī)器人通常全靠“大腦”(總控制系統(tǒng))來控制動(dòng)作,一旦總控信號中斷,就會(huì)導(dǎo)致全身“癱瘓”;如果掌握鰻魚的運(yùn)動(dòng)技巧,就能讓運(yùn)動(dòng)控制變得更簡單。
對鰻魚進(jìn)行分析后,研究人員發(fā)現(xiàn)了它的兩點(diǎn)特征:
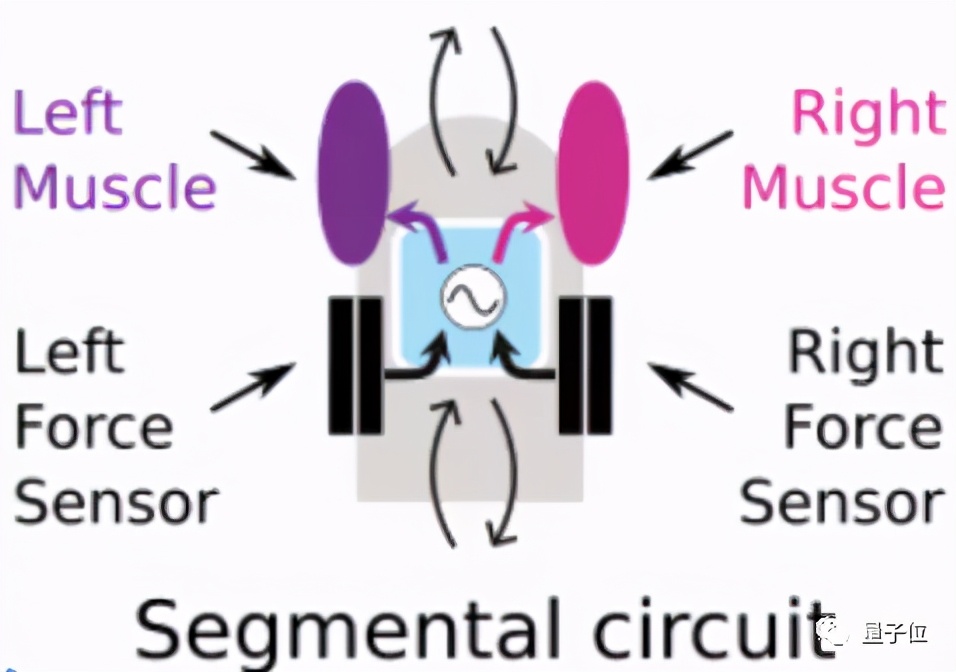
其一,通過周圍神經(jīng)系統(tǒng),來感知環(huán)境并協(xié)調(diào)運(yùn)動(dòng);其二,通過中樞神經(jīng)系統(tǒng),用一組神經(jīng)元(神經(jīng)振蕩器)產(chǎn)生規(guī)律的肌肉活動(dòng)來抵御通信中斷。
根據(jù)這兩個(gè)特征,科學(xué)家們設(shè)計(jì)了一個(gè)波動(dòng)式游動(dòng)的“鰻魚”機(jī)器人。
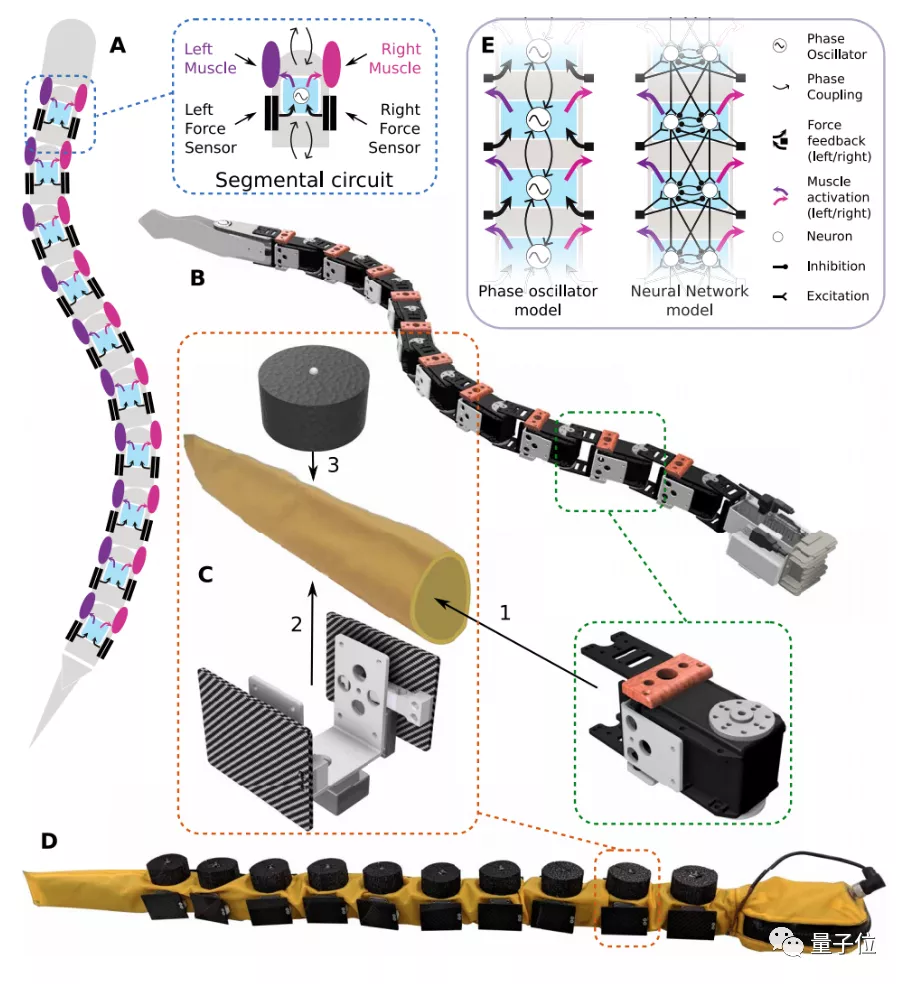
首先,環(huán)境感知部分,即機(jī)器人的“周圍神經(jīng)系統(tǒng)”。
研究人員設(shè)計(jì)了一組由通信電路、帶有放大器的測壓元件和纖維板構(gòu)成的力學(xué)傳感器,作為機(jī)器人的“感應(yīng)皮膚”,用來感知水中的動(dòng)力。
這組力學(xué)傳感器被磁鐵固定在機(jī)器人的外側(cè),與相鄰模塊連接,最終與頭部相連,它會(huì)將信號反饋給神經(jīng)元,以此控制左右側(cè)“肌肉”的運(yùn)動(dòng)。
每個(gè)模塊的頂部,還有一個(gè)浮動(dòng)元件,用于運(yùn)動(dòng)跟蹤。
力學(xué)傳感器和浮動(dòng)元件,共同構(gòu)成了機(jī)器人的“皮膚”(圖中黃色防水布外圍的黑色部件),機(jī)器人通過它們感知到水流壓力,實(shí)現(xiàn)貼著障礙物游動(dòng)、同時(shí)避免撞上障礙物的效果。
然后,控制運(yùn)動(dòng)部分,即機(jī)器人的“中樞神經(jīng)系統(tǒng)”。
這部分由10個(gè)伺服電機(jī)組成,每部分都是一個(gè)獨(dú)立電路,由搭載Linux系統(tǒng)的計(jì)算機(jī)、電池和被動(dòng)連接模塊組成,構(gòu)成控制一段肌肉的系統(tǒng)。
各部分控制系統(tǒng)完全獨(dú)立,即使某一部分損壞,剩下的模塊也能根據(jù)傳感器實(shí)現(xiàn)規(guī)律的肌肉活動(dòng),就像節(jié)拍器共振一樣:
運(yùn)動(dòng)起來非常有節(jié)奏感:
然后,再用一層防水泳衣將“中樞神經(jīng)系統(tǒng)”裹住(外側(cè)的黃色布料),系統(tǒng)就做好了。
這樣的“鰻魚”機(jī)器人,真能在控制系統(tǒng)等部件壞掉時(shí),正常運(yùn)動(dòng)嗎?
可貼墻游動(dòng),多次中斷也不停
研究人員在2米×6米×0.31米的水池里對機(jī)器人進(jìn)行了測試。
接受測試的結(jié)構(gòu)有4種,分別是無傳感器(CPG)、無耦合(前后部件無關(guān)聯(lián))、無神經(jīng)振蕩器、全功能(論文所提結(jié)構(gòu))。
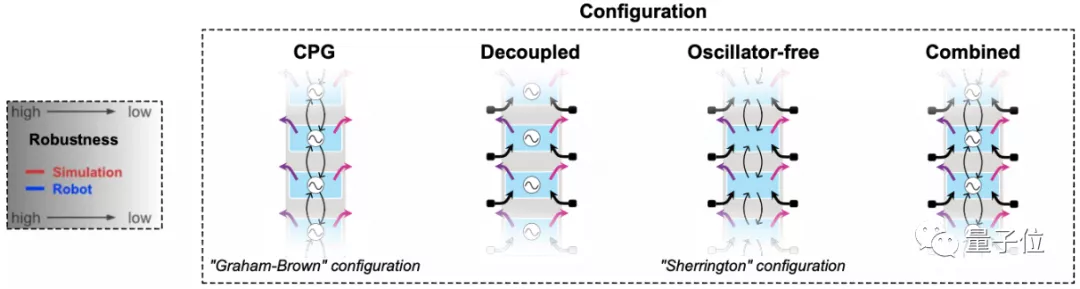
下圖是人為短暫中斷不同部件的運(yùn)轉(zhuǎn)后,這幾種機(jī)器人速度下降的情況(圖A~P),其中橫軸表示中斷次數(shù):
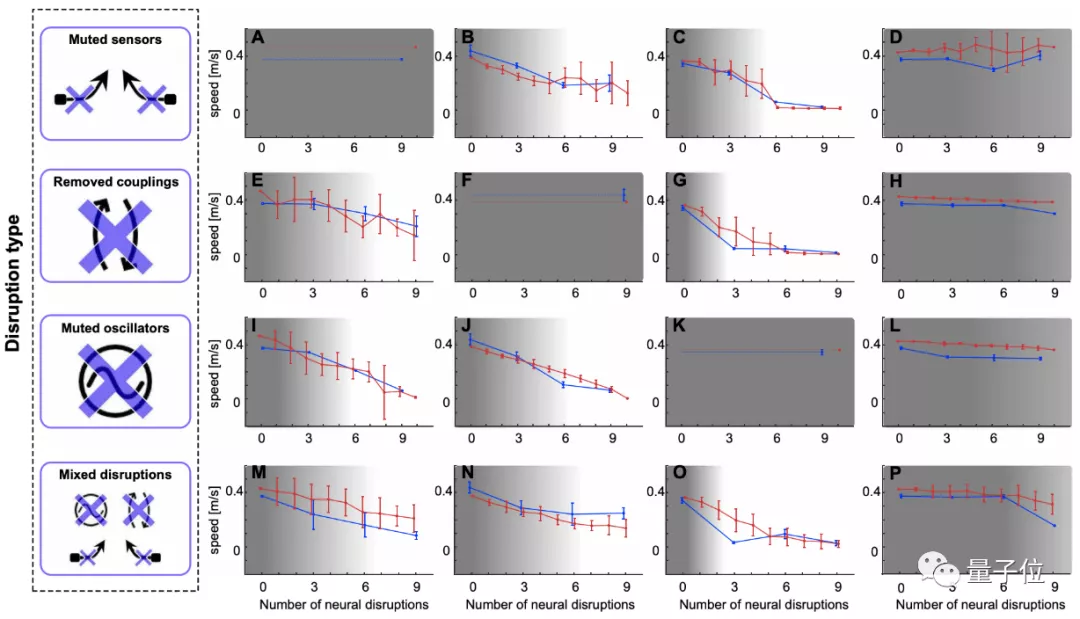
從圖中來看,中斷類型分為4種:傳感器中斷、耦合中斷、神經(jīng)振蕩器中斷和三種部件全部中斷。
顯然,無論是三種部件全部中斷、還是其中一種中斷的情況下,這一結(jié)構(gòu)的機(jī)器人都要比其他幾種機(jī)器人架構(gòu)好得多。
其他類型的幾種機(jī)器人,在面臨多個(gè)部件中斷的情況下,次數(shù)超過9次后速度就已經(jīng)下降到0。
只有論文介紹的機(jī)器人結(jié)構(gòu),在多部件中斷9次后,還能保持0.1m/s以上的速度。
這也表明,論文中提出的機(jī)器人即使在“中樞神經(jīng)系統(tǒng)”(總控)和“周圍神經(jīng)系統(tǒng)”(傳感器)中只有一個(gè)起作用的情況下,也能保持幾乎不變的運(yùn)動(dòng)速度。
只有在總控和傳感器同時(shí)、多次中斷的情況下,機(jī)器人的速度才會(huì)緩慢下降。
這項(xiàng)研究對于可重構(gòu)和模塊化機(jī)器人非常有用,也能用于搜救和環(huán)境監(jiān)測中,提高了機(jī)器人的魯棒性。
作者介紹
一作Robin Thandiackal,本科畢業(yè)于ETH(蘇黎世聯(lián)邦理工學(xué)院),博士畢業(yè)于EPFL(洛桑聯(lián)邦理工學(xué)院),目前在哈佛大學(xué)進(jìn)行博士后工作。
共同一作Kamilo Melo,曾經(jīng)在EPFL進(jìn)行博士后工作,此后創(chuàng)立機(jī)器人公司KM-RoBoTa,同時(shí)仍然與EPFL進(jìn)行學(xué)術(shù)合作。
其他的8名作者,則分別來自EPFL、法國南特大學(xué)數(shù)字科學(xué)實(shí)驗(yàn)室(LS2N)、日本東北大學(xué)、舍布魯克大學(xué)。
除了研究鰻魚機(jī)器人以外,Kamilo Melo的公司還研究過抗摔抗掉落的蛇形機(jī)器人:

論文地址:
https://robotics.sciencemag.org/content/6/57/eabf6354

















