攝像頭、雷達、地圖都不用,雙足機器人走路全靠「我覺得」

雙足機器人昂貴、復(fù)雜且易碎。單從平衡性來看,雙腳站立和行走要比四足難得多,但由于雙足機器人更像人,仍然有許多研究者致力于研發(fā)雙足機器人。
對于機器人(雙足機器人、四足機器人、履帶式機器人等)來說,爬樓梯一直是一個巨大的挑戰(zhàn)。雙足機器人上下樓梯時需要大量的感知和計算,幾乎是在實驗階段就相當(dāng)脆弱,可能會被摔壞,甚至以失敗告終。
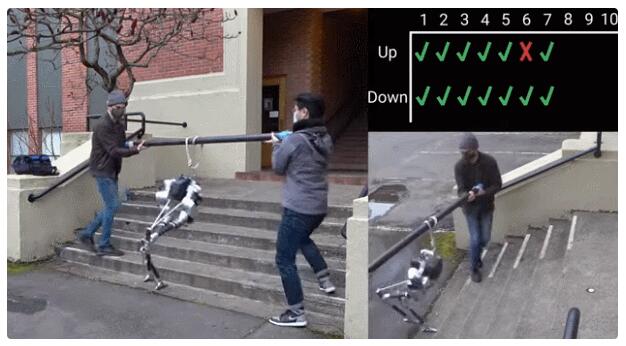
解決雙足機器人走樓梯問題的一種方法是需要更好的感知力和更多的計算來模擬樓梯和規(guī)劃腳步路徑。而近日來自俄勒岡州立大學(xué)和 Agility Robotics 的研究者提出了一種方法,只是將雙足機器人 Cassie 隨機扔在了室外樓梯上,完全不用任何感知就完成了走樓梯的任務(wù),并且完成效果驚人。該論文將于 7 月在 RSS(Robotics Science and Systems) 2021 上發(fā)表。
論文地址:https://arxiv.org/pdf/2105.08328.pdf
雙足機器人 Cassie 上下樓梯的效果如下,研究人員為 Cassie 配備了安全繩,只是為了防止機器人「災(zāi)難性的墜落」,繩子保持松弛狀態(tài):


Cassie 還可以壓馬路:
復(fù)雜環(huán)境也能行走,不過還是被絆了一跤:

但是,Cassie 也有摔倒的情況:
雙足機器人 Cassie
需要注意的是:Cassie 沒有感知,也就是說它并不知道自己上樓梯或下樓梯的信息。但該機器人可以自身反饋,這意味著它知道自己的肢體與樓梯有怎樣的接觸。此外,由于安全繩保持松弛,因此 Cassie 沒有得到任何額外的幫助,安全繩只是為了防止機器人災(zāi)難性的墜落。
實驗過程中,Cassie 經(jīng)歷了諸多坎坷:它撞到了欄桿上,腳趾斷了,從臺階上滑下來,完全沒踩到臺階,偶爾還會倒退。但令人驚訝的是,Cassie 還能堅持走到它該去的地方。

Cassie 沒踩到臺階,但它站起來之后繼續(xù)完成了任務(wù)。
這就是這項研究如此令人興奮的原因,與其嘗試開發(fā)一種依靠高質(zhì)量感知和大量計算的完美樓梯系統(tǒng),還不如開發(fā)一種包含現(xiàn)實世界約束,同時設(shè)法實現(xiàn)這一目標(biāo)。即使這不是最優(yōu)雅的,但在現(xiàn)實世界中具有魯棒性。
研究人員利用強化學(xué)習(xí)方法,根據(jù)典型的城市建筑規(guī)范,訓(xùn)練模擬 Cassie 走樓梯,樓梯設(shè)置高達 8 個臺階。為了將學(xué)習(xí)到的爬樓梯策略有效地從模擬遷移到現(xiàn)實世界中,該研究在模擬中設(shè)置了多種干擾,這些干擾用來表示難以精確模擬的各種現(xiàn)實事物。
例如,Cassie 模擬摔倒混亂、行走速度調(diào)整以及模擬地面摩擦引起的抖動等。因此,盡管模擬無法完全模擬真實的現(xiàn)實環(huán)境,但隨機混合模擬可以確保該機器人的控制器在各種情況下具有魯棒性。
使用強化學(xué)習(xí)來訓(xùn)練機器人的一個特殊之處是,有時即使提出了非常有效的方法,但并不清楚其確切原因。
論文第一作者 Jonah Siekmann 表示他們觀察到:Cassie 在上樓梯時,走得越快就會走得越好。這對機器人來說有點違背直覺:
由于 Cassie 沒有視覺能力,因此在選擇落腳點時非常糟糕。如果它試圖將腳放在樓梯的拐角處,并將其重心轉(zhuǎn)移到這只腳上,那么結(jié)果就是它會摔下樓梯。就步行速度而言,這并沒有什么大問題,因為 Cassie 的動力系統(tǒng)可以讓它克服短瞬間的向后移動(即一定程度上避免跌倒)。在低速狀態(tài)時,該動力系統(tǒng)不足以克服不良的落腳點帶來的問題,它會不斷撞到樓梯,直至摔倒。而在高速狀態(tài)時,機器人往往會跳過一些臺階,從而使 Cassie 接近甚至超過其極限。
Siekmann 表示糟糕的落腳點導(dǎo)致了 Cassie 出現(xiàn)了一些「冒險行為」。他說「有時,Cassie 在下降過程中跳過了一至三個臺階,然后又恢復(fù)正常的下樓狀態(tài),這尤其令人驚訝。Cassie 在上樓時也絆倒然后又爬起來了。這個物理過程很復(fù)雜,因此學(xué)得的控制器中嵌入的那些精準(zhǔn)的反應(yīng)是非常令人興奮的。此前我們還沒有見過這種魯棒性。」
如果要比較 Cassie 上下樓梯是否比蒙住眼睛的人更好,研究者表示這很難說。Siekmann 說:「我們多次開玩笑說 Cassie 在爬樓梯方面是超人,因為在拍攝這些視頻的過程中,由于要專注于拍攝 Cassie(一定程度上沒有看臺階),我們在上樓的過程中也絆倒了幾次。」
在執(zhí)行動態(tài)任務(wù)時,比人類更好的機器人顯然是一個非常高的標(biāo)準(zhǔn),但也許大多數(shù)人實際上并沒有像 Cassie 那樣為盲目樓梯導(dǎo)航做好準(zhǔn)備,因為 Cassie 本身就是基于樓梯訓(xùn)練的,并且在訓(xùn)練過程中添加了少量「噪聲」,以使樓梯并不是完全均勻的,以防止 Cassie 通過本體感受推導(dǎo)樓梯的精確尺寸,并過度擬合至完美統(tǒng)一的樓梯。
實際上,人類在閉著眼睛嘗試爬樓梯時,會依賴于「樓梯是完美統(tǒng)一的」這種假設(shè)。當(dāng)人類無法依靠這樣的假設(shè)時就會陷入困境。
Cassie 和大多數(shù)機器人一樣受到一些約束。如果它看上去比其他機器人更有趣,那是因為它使用的是專門針對樓梯和類樓梯場景設(shè)計的特定樓梯控制器。
研究團隊成員 Green 解釋說:「當(dāng)你訓(xùn)練神經(jīng)網(wǎng)絡(luò)充當(dāng)控制器時,學(xué)習(xí)算法會隨著時間的推移完善網(wǎng)絡(luò),以使其針對特定環(huán)境的回報最大化。這意味著,與在平坦地面上進行訓(xùn)練相比,通過在階梯上進行訓(xùn)練,我們得到了完全不同的控制器。」他表示:樓梯控制器可以在平坦的地面上正常工作,但效率較低,且噪音較大。該研究團隊正在研究集成多個步態(tài)控制器的方法,這些步態(tài)控制器可以根據(jù)機器人的具體工作方式進行調(diào)用。這可能會涉及一些非常簡單的感知系統(tǒng),只是告訴機器人「嘿,前面有樓梯,你最好采用樓梯模式!」