













人機交互中的情境認知
無論是狹義的人機交互(人-計算機交互),還是廣義的人機交互(人-機器-環境交互),都將必不可少地涉及到信息問題,即信息的輸入、信息的處理和信息的輸出三個基本過程,前面一章我們結合這個基本過程對人機交互中信息輸入——人的感覺過程進行了描述,下面將針對信息的處理部分——人的情境認知特性進行說明。
1 情境認知的概念
1.1情境意識與情境認知的關系
前雷鳥飛行隊的領隊和美國空軍參謀長(1990年-1994年任期)Merrill McPeak認為區別一個好的戰斗機飛行員與一個偉大的戰斗機飛行員的一個標準就是是否具有情境意識(Situational Awareness, 簡稱SA)。Merrill McPeak 認為如果一個飛行員能夠對近期剛剛過去的情境和當前的情境在頭腦中建立和保持準確清晰的畫面,那么他就能創造出輝煌的戰績。既然情境意識那么重要,那它究竟是什么呢?
在第一次世界大戰期間,Oswald Boelke提出了這樣的觀點“在敵人意識到我們之前獲得對敵人意圖的意識是非常重要得,因此我們迫切地需要找到實現這個目的的方法”,這就是情境意識概念的雛形定義。在二十世紀八十年代之前,這個思想并沒有獲得太多的重視,但是,自從20世紀80年代后期以來,這個思想已成了最受人-機-環境系統工程學中人機交互研究領域關注的問題之一。確切地說,對這個問題的原始動力源自于航空工業的要求:隨著航空設備自動化/智能化水平的不斷提高,飛行員及空中交通管制人員的任務、時間壓力很大(即人的體力負荷下降、心理負荷增加的現象變得更加突出),這就要求他們應具有更好的情境意識以應對日益復雜的監視/控制操作。因此,對情境意識的研究在航空人機交互領域已成了一個極有發展前景的研究方向。
與其他涉及到人主觀活動的的概念(如注意、工作負荷、緊張、冒險)相似,情境意識(SA)的定義并不是絕對唯一的,而是被用來描述那些不能被直接測量、評價概念,這也是造成此概念難以準確定義的一個重要原因。目前,對情境意識的定義公認比較好的是Endsley于1988年人素學協會年會上發表的“Design and evaluationfor Situation Awareness enhancement”(Proceedings of the Human Factors Society 32 nd Annual Meeting (Volume 1, pp. 97-101). Santa Monica, CA)一文中提出的情境意識(SA)的定義:“…the perception of theelements in the environment within a volume of time and space, thecomprehension of their meaning, and the projection of their status in the nearfuture.”(情境意識就是在一定的時間和空間內對環境中的各組成成分的感知、理解,進而預知這些成分的隨后變化狀況。)。
另外,1995年,Smith和Hancock的定義是:“Situationalawareness is the invariant in the agent-environment system that generates themomentary knowledge and behaviour require to attain the goals specified by anarbiter of performance in the environment.” (情境意識是人-環境系統中的不變量,該不變量產生瞬間的知識和行為特性以滿足由一個在環境中決定者提出的具體要求。)。而Bedny和Meister于1999年對情境意識也下的定義則是這樣:“Situational awarenessis the conscious dynamic reflection on the situation by an individual. Itprovides dynamic orientation to the situation, the opportunity to reflect notonly the past, present and future, but the potential features of the situation.The dynamic reflection contains logical-conceptual, imaginative, conscious andunconscious components which enables individuals to develop mental models ofexternal events.”(情境意識是一個個體對情境有意識的動態反應。它不但反映了情境的過去、現在和未來動態變化趨勢,還反映了該情境可能的要素特征。這種動態的反映包括邏輯概念、想象虛構、有意識和無意識的成分——能夠使個體形成外部事件的心理模型。)
結合上面提到的三個情境意識定義,我們可以看出,Endsley1988年的定義主要強調當前情境的感知、理解及未來發展預測;相比之下,Smith 與Hancock1995年的定義則側重于人與情境之間的交互,主要集中于兩者之間有機協調作用的方法;而Bedney和Meister 1999年提出的定義則主要著重于情境意識產生反射的方面,尤其是涉及到了對當前系統理解的心理關系模型。這些定義之間的主要區別是:它們對決定情境意識的交互特性側重的程度不同,這種區別也可以根據是側重情境意識的過程還是情境意識的結果來衡量,而這兩者很可能對正確地理解情境意識都起著重要作用。從根本上說,SA就是指意識到你周圍發生了什么,并且了解這些信息對你的現在和將來都意味著什么。這種意識通常以如下方式定義:即對于一項特定的工作或目標來說,最重要的信息是什么。
盡管情境意識作為人機交互領域中非常常見的概念,但是它仍然缺乏統一的嚴格定義,幾乎每個學者或對此都可能有不同的定義。然而,作為把人、機和環境之間的交互作為一個整體來進行分析的集成概念,它仍具有基本的可描述性:一般而言,通過情境意識這個概念可以把人的能力、經驗、目標驅動行為、信息環境、資源約束及其它們之間的相互關系有機聯系成為一體。但情境意識本質上不是決策或執行行為,例如,人可以存在這樣的情形:有較高的情境意識,但執行行為的績效卻較差(較差的反應);有較低的情境意識,但執行行為的績效卻較好(較好的反應)。這是由于有許多其他的因素(如決策產生偏差,執行反應失誤等)會影響情境意識的處理過程。
我們研究的情境認知(situation(al) cognitive,SC)與情境意識(SA)不完全相同,它不但包括情境意識,而且還包括決策、執行行為等因素。它們之間的關系詳見圖1所示:
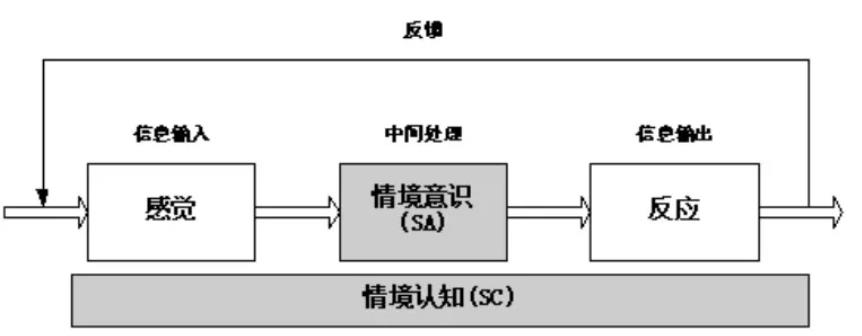
圖 1 情境認知(SC)與情境意識(SA)研究內容區別系統圖
從上圖可以看出:在信息處理過程中,情境意識(SA)只屬于中間處理階段,而情境認知(SC)則貫穿了整個信息處理過程,即包括了信息的輸入、中間處理和信息的輸出三個階段,因而可以宏觀地說,對情境認知(SC)的研究就是對以“人”為核心的人、機、環境三者之間關系及其最佳匹配研究,同時也是人機交互界面(如汽車、飛機等駕駛室顯示/控制面板)優化設計的基礎和根據,是保障人員安全和提高訓練效率的重要手段,是涉及到研究新一代高性能軍用、民用飛機亟待解決的重大安全技術問題。對交通運輸、智能家居、機器人的智能化/情感化、工業設計/控制、空中交通管制員/飛行員的科目訓練等相關的研究領域都有著現實意義,尤其是對當前高新技術中的人機系統功能優化設計與配置方面有著重要的現實指導意義。
上個世界末,如何提高空戰中飛行員的情境認知已成了美國空軍發展計劃署(USAF Development PlanningDirectorate)對人機交互系統技術投資的一個重點目標,并正在進行實時情境評估智能處理器項目(OLIPSA ON-LINEINTELLIGENT PROCESSOR FOR SITUATION ASSESSMENT)的研究,見圖2;同時歐洲共同體也正在實施“通過情境認知整合提高訓練的安全性”(ESSAI Enhanced Safety through Situation AwarenessIntegration in training)的項目研究計劃。
圖3說明了OLIPSA模型的功能方塊圖,具有四個階段處理器結構:(1)一個事件檢測器;(2)一個當前情境評估器;(3)一個未來情境預測器;(4)一個發生事件環境處理器。
下面將結合我們的研究進行以下幾個問題的探討:情境認知究竟是什么;有關情境認知的影響因素;有關情境認知的定性模型分析。
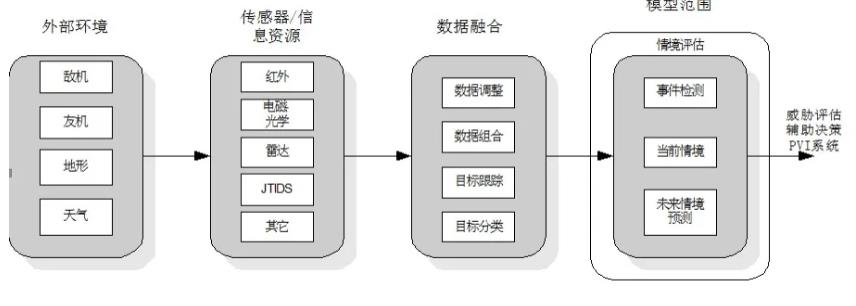
圖2 機載數據融合及情境評估的全部環境
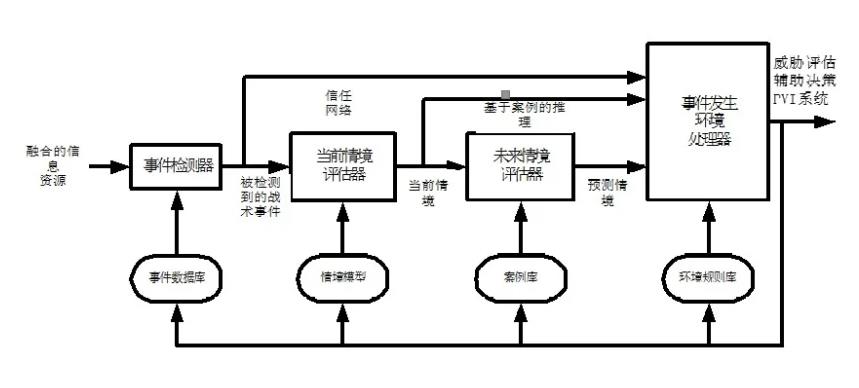
圖3 OLIPSA模型的功能方塊圖
2 情境認知機理
情境認知機理與情境認知定義的概念、方法有著密切地聯系。三個主要的理論方法是:信息處理方法、行為方法、生態關系(人與環境之間的關系)方法。信息處理方法已由Endsley(1995)用三級情境意識模型較好地得到描述,這種方法把一個發展的情境認知看作高層的認知處理行為。而行為理論方法僅把情境認知看作有意識的朝向動態反應行為(如Bedny和Meister所描述的那樣, 1999)。感知循環模型把情境認知看作是人與所處環境間的一個動態交互作用,這種方法的支持者建議把情境認知定義為這種交互作用的前后關系(Smith和Hancock, 1995;Adams等,1995)。下面將針對這三種觀點依次進行說明。
2.1 三層模型理論
Endsley的三層情境意識(SA)模型最初就是應用在理解航空任務方面(如飛機駕駛和空中交通控制這些要求操作者根據不斷變化的環境進行覺知的動態刷新領域)。該模型被分成三層,每一階段都是先于下一階段(必要但不充分),該模型沿著一個信息處理鏈,從感知通過解釋到預測規劃,從低層到高層,具體如下:
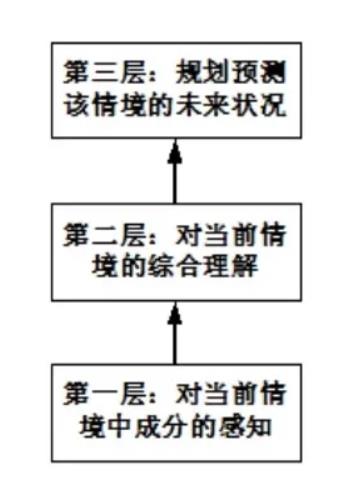
圖 4 情境意識的三級模型
(1)第一層:感知情境中的元素
具備情境意識(SA)第一步就是要感知環境中相關因素的重要性、特性、力度。對于不同的領域和工作類型,SA的要求是很不一樣的。如對于一個飛行任務而言,在飛機駕駛艙中,飛行員所要感知的重要元素是其他飛行器的狀態、飛行高度、系統態勢、警示燈以及它們相關的飛行數據特性等;而對于一個地面指揮員來說,他需要的是了解敵軍狀態、鑒別敵我雙方的位置和行為、地勢障礙特征和天氣情況等因素。同樣,對于一個航空交通管制人員或者機動車駕駛員則需要完全不同的信息作為情境意識。
信息感知可以通過視覺、聽覺、觸覺、味覺、嗅覺或它們的綜合。比如,一個調酒師可能會通過嘗、聞或視覺刺激來收集發酵過程中的重要信息;一個外科醫生會調動所有感覺以及可得到的其他歷史信息來診斷病人的健康狀況,所有這些可能都是細微不易察覺的。一個訓練有素的心臟病學家可以聽出心跳節奏中幾分鐘之內的不同之處,也可以看得出心電圖紙所顯示出的重要特點,然而這些正是未訓練過的觀察者會經常忽略掉的;有經驗的飛行員僅憑聽到發動機的聲音或在座艙里看到指示燈的狀態就知道那里出了毛病;同樣,在很多復雜的系統當中,電子顯示及系統提供的可讀信息更需要得到重視,然而事實上很多第一層的情境意識來自于人直接感知環境——看看窗外或感覺震動,常常忽略了一些重要的間接信息來源,使得情境意識的第一層就存在不完整性。
每一種信息來源都與可靠性的不同層有關。在大多數領域中,信息的可信性(主要基于傳感器精度、組織或提供信息的個體可靠性)以及信息本身共同構成了情境意識第一層的重要部分。
在許多領域中,僅是搜集第一層的所有需要數據就是一項非常困難的工作,如在軍事行動中,由于變化迅速的情境中視野模糊、噪聲、煙霧、迷惑性信息、動力學因素等的影響,就很難對該情境的所有因素做出評估,而地面指揮員必須要在敵軍極力保密或提供假消息情況下對當前態勢做出判斷,其難度可想而知。又如在飛機降落階段,跑道標志可能很模糊,相關信息飛行員可能也知之甚少,對于復雜系統(如電子設備)中大量信息的蜂擁而至,使得感知有用信息變得異常困難,如何準確及時處理大量直接、間接信息,并實施決策,這對于飛行員是非常困難的。
航空領域關于SA的問題大部分出現在第一層中。Jones和Endsley(1996)發現,情境意識中76%的錯誤都與未注意到必要信息有關。在一些案例中(大約2/5),必要信息并未提供給本該了解這些信息的人員,或由于系統局限或缺陷并未清晰地呈現出來,而導致了這些錯誤的發生。例如,跑道線退色模糊、天氣多云或者天電干擾無線電信號傳送。在另外一些案例中(大約1/5),他們也確實探測到一些必要信息,但隨后得到一些新信息后就把之前的信息忘掉了。還有一些案例中(大約1/3),所有信息都擺在那,其中關鍵信息卻沒有抓出來。這可能由于人們被外界因素干擾而分心(比如一個電話或與工作無關的談話),更多的可能由于人們處理了工作中與緊迫任務相關的其他信息。基于情境意識的設計也就意味著確保系統中必要信息是可以獲得的,其呈現方式使得用戶很容易處理這些系統信息,以免可能有大量未經過過濾的信息占用著用戶有限的注意資源。
(2)第二層:理解當前情境
擁有情境意識的第二步,就是要理解與相關目標和對象有關系的數據和感知到的暗示都意味著什么。這種理解(SA第二層)是基于對第一層中不連貫的元素進行整合,以及這些信息與個人目標所進行比較而得出的。它包括將眾多數據流匯聚成信息,也包括重視這些合成信息的重要性和意義,因為這些信息涉及近期目標的實現問題。情境意識第二步就像是擁有很高的閱讀理解水平,而不僅僅是讀懂單詞。
比如鄰近十字路口的司機,他看到黃燈亮了,此時他知道他必須根據與十字路口的距離來處理這個警示,并通過感知到前面車的減速情況,進一步決定要停下來還是穿過這個路口以及在靠近前車的速度大小。這樣,司機對于情境如何影響他的目標理解也定義了情境意識第二層所必需的條件是什么。
在起飛過程中,飛行員一旦看到預示問題的警示燈亮起,就要立刻通知指揮塔臺以判斷問題的嚴重性,并運用多年跑道經驗來綜合看待這些問題,當然同時也是為了明確是否應當終止飛行做準備。一名新飛行員可能和許多老飛行員一樣可以達到SA第一層,但是在整合眾多目標數據信息以期獲得更好的情境理解時卻有很多不足之處。
對于一個地面指揮員來說,他的SA第二層或許包括以下理解:特定地區的分析報告也就意味著附近敵軍的態勢,或者觀察地面車輛走過的痕跡,并據此推斷其所在部隊的前面剛走過什么軍種以及數量等。
通過理解數據流的重要性,具備情境意識第二層的人已經可以把與目標相關的特定含義與手邊的信息聯系起來了。至于目標的重要性以及它們如何影響情境意識將在本章的后半部分將會充分探討。
據統計,大約19%的航空情境意識錯誤都與情境意識第二層的問題有關。在這類案例中,人們能夠看到或聽到必要數據(情境意識第一層),但卻不能正確的理解這些信息的意義。例如,一個飛行員可能知道他的飛機在海拔一萬米的高度,但可能并未意識到下面有山而造成的空間不夠,或者他已經偏離了飛行航線控制系統的控制范圍。如何根據感知到的眾多信息流加深對當前情境的理解需要很好的數據融合能力或一個智力模型,這樣才能把這些迥然不同的數據流整合在一起并解釋出來。一個新手,或者剛到達一個全新類型的場景的人,可能并沒有這種知識背景可以參考,所以談及發展加深情境意識第二層時,他們將處于明顯的劣勢。我們在這章的后半部分將著很多筆墨來探討智力模型的作用。
(3)第三層:預測將來的情境
一旦人們知道了元素是什么以及對于當前目標而言它們意味著什么時,就可以預測這些元素將來會起什么作用(至少是短期的),這種能力即情境意識第三層。一個人只有能夠很好的理解情境(第二層)和他所操作系統的功能和趨勢時,才能達到情境意識第三層。
擁有了情境意識第三層,司機就可以知道如果紅燈時他繼續過十字路口的話,他可能會被車撞倒。這個可能性使得他作決定前更加謹慎;地面指揮員基于自己的情境意識第三層,可以預測敵軍將從哪個方向靠近,以及己方行動可能的效果如何。飛行員和空中交通管制人員可以積極有效地預測各個飛機的動向,以及提前預判可能出現的問題。
根據當前情境的理解形成預測,這需要非常了解該領域(一個高度完善的智力模型)以及大量的智力工作。很多領域的專家都耗費了大量時間來研究形成情境意識第三層以及發展預測理論。近幾年,通過不斷的研究,有些專家開發出了一套某個具體領域的情境意識理論并可以對事件做出相應的回應,規避了很多令人不快的情境,如目前我國已開發出了奧運會應急事件預案處理系統等。
一般而言,在情境意識第二層的基礎上沒能形成正確及時的預測(形成情境意識第三層),這可能是因為沒有足夠的智力資源(如一個人不斷的超量輸入其他信息),或者是因為沒有足夠的專業知識。但有時也是因為過分主觀估計當前形勢,比如,空中交通管制人員主觀地猜測一架飛機將會在它現有速度的基礎上減速,而不是在以減速的基礎上勻速。據統計,目前大約6%的航空情境意識錯誤與情境意識第三層有關。可能是因為在這個領域,獲取情境意識第一層和第二層的難度要遠遠大于獲得很好的第三層吧。若沒有足夠的專業知識,設計精細的信息系統,還有良好的用戶界面,人們可能會止步于情境意識早期階段,很難達到第三層,這可能與情境意識受任務因素、環境因素和個體因素影響的緣故吧。這從一個側面也說明了為什么兩個人面對相同的任務可能得出不同的結論,這應該與人的不同能力、經驗、訓練等因素有關。
總之,Endsley的三層情境意識(SA)模型表明隨著信息在較高層處理,覺知程度越來越高,并指出綜合理解需要用知識和目標來整合外部的數據,進而預測后續的情境變化。這個模型基于普通的認知過程,適用于多個應用領域。在動態系統中,Endsley建議應根據系統的具體子類(如模式覺知、空間覺知、時間覺知)進行有區別地分析處理。
感知時間和眾多元素的時間動力都對情境意識起著重要作用。一般說來,時間在眾多領域中都對情境意識產生巨大作用。情境意識中一個關鍵問題就是要了解:在事件發生或必須采取某些行動之前,有多少時間可以利用。
大部分領域中,操作者收集外部(情境)信息時,他們感興趣的不僅僅基于空間(某些元素有多遠),而且還包括該元素要過多久才會對他們的目標和任務產生影響。時間在情境意識第二層(理解)和第三層(預測將來事件)中都有著重要作用。情境意識中另外一個很重要的時間因素即真實世界情境意識的動力因素,即對于信息變化速度的理解要充分考慮到對將來情境的預測。由于情境是在不斷地變化的,所以人們的情境意識也必須不斷地變化,否則就會信息過時或不準確。在高度復雜的不確定性環境中,操作人員為了保持情境意識,最好通過訓練獲得的動態信息處理認知策略。
2.2 子系統交互理論
第二種方法基于行為理論(如Bedny和Meister所描述的那樣)。該理論提出了由八個主功能塊組成的朝向行為函數模型。這是一種交互式、認知、子(次)系統方法。作為一個信息處理方法,它與傳統的認知心理方法不同,不是對感知、記憶、思維和行為執行的具體處理,而是依賴于任務的性質和個體的目的進行的處理。這種觀點看上去與認知心理學的矩陣方法類似,由過程的兩個主要維度和功能構成。在情境評估方面,Bedny和Meister主張功能塊必須朝向該情境的含義理解任務。他們的模型的八個功能模塊通過前饋和反饋循環進行連接,如圖5所示:
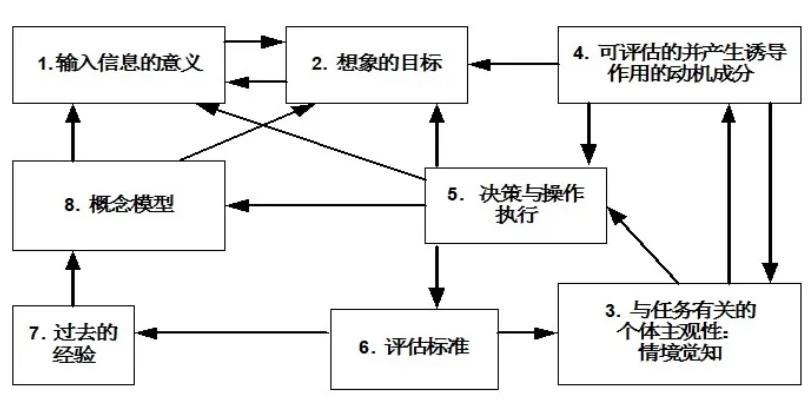
圖 5 情境認知的一個交互式子系統方式示意圖
如圖5所示,在情境認知和行為建構發展中,每個功能模塊都有一個具體的任務,其內容依賴于動態情境的特性。其作用如表5所示:
表1 圖5中功能模塊的輸入及作用總結表模塊功能輸入塊作用總結
|
模塊 |
功能 |
輸入塊 |
作用總結 |
|
1 |
含義 |
解釋從外而來的信息 |
|
|
2 |
想象 |
||
|
3 |
條件 |
4,5 |
|
|
4 |
評估 |
3,6 |
|
|
5 |
3,4 |
||
|
6 |
標準 |
4,5 |
|
|
7 |
經驗 |
6 |
|
|
8 |
模型 |
7 |
由Bedny和Meister提出的活動理論是指,通過傳感器-感知系統獲得新信息傳到功能模塊1,再由個體的環境概念模型(功能塊8)、它們的任務目標計劃‘圖式’(功能塊2)和它們要求活動類型的朝向(功能塊5)進行解釋。然后,這個解釋通知人的任務目標完整的‘圖式’(功能塊2)。依據指向任務目標(功能塊4)的重要性和動機及其與環境的結合(功能塊5),由個人決定在功能塊3內有關的環境特征是什么。它們結合任務目標的程度在功能塊2內被決定,并依次受評估制定標準(功能塊6)和環境當前狀態(功能塊3)的影響。這種評估的結果控制操作行為和人與任務的結合(功能塊5),從中可以產生進一步的標準(功能塊6)。與環境的交互作用被當作經驗(功能塊7)儲存并通知個體儲存環境的表征(功能塊8)。如交互式模型所示,從人的行為和概念模型(分別為功能塊5和8)得來的信息前饋到來自環境信息的新解釋(功能塊1)。
作為一個活動的系統理論,該模型看上去并不完善,主要有兩個重要的問題:一是缺乏來自功能塊2的前饋(如一條連接功能塊4的直線),二是從功能塊5沒有到環境的連接直線。盡管這樣,交互式子系統對人的認知進行了較有力的說明。Bedny和Meister認為產生情境認知的關鍵過程是概念模型(功能塊8)、圖式-目標(功能塊2)和主觀相關任務條件(功能塊3)。他們建議前兩個功能塊應是相對穩定的(即功能塊2和8),而后者更易于控制(功能塊3)。如果操作者誤導了主觀相關事物,那么將導致情境認知的錯誤發展。這可能被認為是喪失了部分的情境認知。這樣以來,將會涉及情境認知整體的進行,進而使操作者重新客觀地評估事物的重要性,并創建一個更接近現實的情境反應將會變得更難。
2.3 感知循環理論
對情境認知的另外一個觀點:是它既不是環境中固有的事物,也不是人的固有的特點,只是通過人與環境交互作用而存在(Smith an Hancock)。這種看法是Neisser的感知循環模型的一個發展(Adams 等)。Adams 等人主張情境認知的過程-結果二分法應根據人的信息處理理論所使用的范圍而定。過程涉及情境認知狀態修正的感知和認知活動,而結果要考慮情境認知狀態中可用的信息和知識。在Neisser的開創性工作“認知與現實”中,他提出這樣的觀點:人的思維方式與其交互的環境緊密相關。他證實:在特定情境中,已有知識將直接導致對某種類型信息的期望(如心理模型),這種知識依次引導行為挑選某種信息并提供解釋信息的準備方式。在事件發展過程中,隨著環境不斷地變化,適應于環境刷新后的內在認知圖信息,將依次引導操作者進一步的搜索,感知循環的一個方框圖說明詳見圖6。

圖 6 感知循環理論示意圖
感知循環可以被用于解釋在飛機座艙內飛行員的信息處理。例如(假定飛行員對他們控制的系統有正確的知識),他們形成的心理模型將能夠使自己預料事件(如飛行中需要的狀態),搜索確定的證據(考慮預測),控制行為過程(不斷調節操縱桿或油門桿)并連續檢查輸出量是否象希望的那樣(儀表顯示是否符合預期的要求)。如果他們發現有些數據與預期的不一致(如儀表讀數或高或低于預期的要求)時,他們就會調動更多有關飛機/環境的知識,以找到充分地解釋支持隨后的監視/控制活動。該模型的完成就是對過程(飛機/環境信號采樣的循環)和結果(在任何一點飛機/環境模型的及時刷新)的描述。
在這些理論中間都有合理的成分。內嵌(embedded)交互式模型(Smith和Hancock;Adams等)在解釋情境認知的動態方面有長處,如瞬間的知識是怎樣被刷新的和環境中的信息是怎樣被檢索到的。這表現了人與環境交互的高層認識,基于系統的方法在這方面似乎特別有用。認知子系統方法(Bedny和Meister)對考慮基本功能及它們可能是怎樣進行交互的方面非常理想。這種方法主要使用于對個體大腦信息處理活動方面。三級情境意識模型(Endsley)用一種注重實效的方式為評估洞察力(領悟抓住事物內在的或隱藏的性質或靠直覺感受的行為能力)的不同程度提供了一個功能模型。盡管內嵌交互式模型認為數據是基于整個環境的狀況獲得的(同時,認知子系統方法認為有關個體的數據也是重要的),三級情境意識模型為“當進行情境知覺分析時,在個體中哪種數據類型可能被查找到”提供了一個指導。通過更綜合的人的認知功能模型所有這三種觀點都得到鞏固。基于對人生理的生物模型研究,Pedersen認為知覺系統具有幾個信息處理級別。第一級要求人們從充滿噪聲的環境中檢測信號和目標,篩出非目標信息;第二級要求人們必須將這些檢測到的信號組織成有意圖的信息模式。最后,即第三級,通過把這些模式歸類整理及合并到已存在的信任和知識網絡,人們必須理解它們。再回到結果-過程二分法,交互式子系統模型和感知循環主要集中于過程,而三層情境意識模型主要集中于結果。在情境認知測量中,這兩者都不能被忽略,因為后者很可能由前者所決定。
目前工效界對情境認知究竟是一個過程還是結果一直存在著爭論。三層模型和交互式子系統強調是結果(也就是操作者大腦中的情境認知的合成狀態),而感知循環則強調是過程(也就是操作者獲取情境認知的行動)。這個爭論很可能要延續一段時間。
3 情境認知過程
在人們的工作記憶中,情境認知是建立在大量不同的認知機制上的。盡管在任何一個領域,情境認知的重要因素都是有很大不同的,但這些領域的基本認知過程其實都是很一致的,因為這種認知過程是所有人都擁有的信息處理能力,情境認知就是這一過程的產物。人的情境認知反過來還會影響人搜索何種信息以及對哪些信息感興趣,這與產品對于過程的影響同屬一個循環圈。通過加深對人們如何發展情境認知的理解以及對這一過程中的挑戰與限制的理解,可以加強情境認知的設計方法就顯而易見了。情境認知就是個性化了的深度態勢感知。
深度態勢感知
深度態勢感知本質上就是變與不變、一與多、自主與被動等諸多悖論產生并解決的過程。所以該系統不應是簡單的人機交互而應是貫穿整個人機環境系統的自主(包含期望、選擇、控制,甚至涉及情感領域)認知過程。鑒于研究深度態勢感知系統涉及面較廣,極易產生非線性、隨機性、不確定性等系統特征,使之系統建模研究時常面臨著較大困難。在之前的研究中,多種有價值的理論模型被提出并用于描述態勢感知系統行為,但這些模型在對實際工程應用系統的實質及影響因素方面考慮還不夠全面,也缺乏對模型可用性的實驗驗證,所以本章重點就是針對深度態勢感知概念的實質及影響因素這兩個關鍵問題進行了較深入探討,追根溯源,以期早日實現高效安全可靠之深度態勢感知系統,并應用于相應的人機智慧產品或系統中。





















